选择显微镜相机时应考虑的事项
得益于技术的最新发展,市场出现很多不错的显微镜专用相机。我们在此对这些相机所采用的方法和技术做一个总结,以此作为获得高质量图像和尽可能利用最新技术进行观察和实验的指导。
图像质量的关键要素
确保显微成像成功的最重要因素是为应用选择合适的光学元件和相机。例如,对于大多数荧光成像而言,sCMOS(科研级互补金属氧化物半导体)相机是一个不错的选择,但不适用于诸如生物发光成像等长时间曝光的应用。以下各节详细介绍了根据应用情况需要考虑的显微镜相机功能和优点相关主要因素。
分辨率 :显微镜可用于观察难以光学解析的微小结构。光学分辨率限制意味着更多的像素或较小的像素间距并不始终能够提供更高的分辨率。获得更好分辨率的关键在于选择与数值孔径(NA)、光学系统总倍率以及样品空间频率相关的适当像素间距。图1是展示500 nm光线和5 μm像素间距成像系统响应的调制传递函数(MTF)示意图。图1(a)表示传感器的奈奎斯特频率为采样频率的一半,或者为传感器像素间距的倒数,其低于等式1中定义的光学截止频率。在这种情况下,可以尝试使用较小的像素间距获得更高的分辨率。另一方面,在图1(b)和(c)的情况下,较小像素的传感器无法提供更高的分辨率,这是因为在中,来自标本的光线已经扩散到远大于光学系统点扩散函数(PSF)的像素间距。还应仔细考虑标本的空间频率。工业样品通常具有锋利的边缘,这意味着其比生物样品具有更高的空间频率,并且需要更高的采样间距。
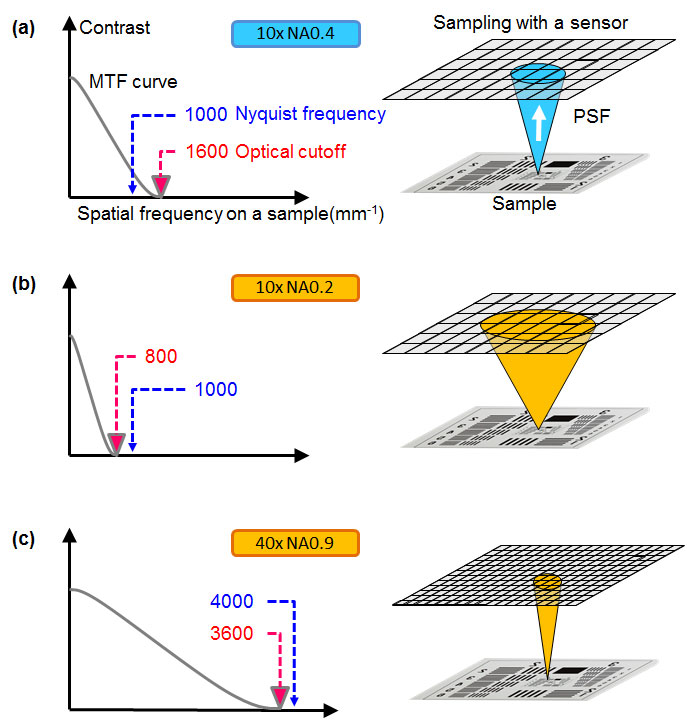
图1 –MTF图(左)和示意图,其中将成像仪的像素阵列投影到标本上(右)用以说明点扩散函数和像素间距之间的关系。(a)10x NA 0.4,(b)10x NA 0.2,(c)40x NA 0.9

灵敏度和噪声 :高信噪比(SNR)对于可靠数据至关重要。在某些情况下,这一点对于非常明亮的标本很容易实现。但是实际上,信噪比存在物理和技术限制。物理限制是由于传感器芯片中产生的光电子数量存在统计误差,该误差由样品的亮度和相机的灵敏度决定。相机的灵敏度由其量子效率(QE)和像素面积决定。与普遍的看法相反,量子效率并非提高灵敏度的唯一因素。像素间距即使略有增加也能够提供更大程度的改善。例如,如果将传感器的像素间距从5.5 μm更改为6.5 μm,灵敏度将提高40%左右,而量子效率在75%和90%之间时,灵敏度仅提高20%。应当对所观察波长的量子效率进行仔细确认。彩色相机的量子效率最高可达到60%,但值得注意的是,由于彩色相机的传感器通常使用拜耳彩色滤色片,因此每个波长上只有四分之一到一半的像素可以检测到荧光。
技术限制主要是由暗电流和读出噪声(包括电路的电气噪声)所致。如今,已经通过传感器冷却抑制CMOS和sCMOS传感器上的热像素,尽管过去传统上将其作为一种针对长曝光时间的暗电流抑制形式。但是,对于大多数相机来说,在不到两秒钟的曝光时间内暗电流不会成为问题。这些限制以等式2和3表示,即相机灵敏度和读出噪声是在短曝光时间内获得更好信噪比的关键因素。比如,如果您使用具有3 e-rms读出噪声和0.05 e- / s /像素暗电流的相机,曝光时间少于2秒的情况下暗电流对背景噪声的贡献比读出噪声小约2个小数点。


帧速 :快速帧速是实时图像观看过程中平滑运行的首要要求。得益于USB 3.0和CMOS技术等高速接口,很多新型相机的帧速都超过了每秒30帧(fps)的实际分辨率。但是,许多应用需要更高的帧速。比如,(1)病理咨询和病例会诊就需要跟随快速显微镜操作的平滑实时成像,(2)快速生物学现象的高质量成像,(3)诸如使用光片荧光显微镜(LSFM)进行三维观察,以及(4)计算成像,其中包括基于图像处理的超分辨率。当为暗荧光显微镜时,则存在与曝光时间有关的实际限制。为了解决这一问题,可使用像素合并或其他图像处理技术增强信噪比。卷帘快门导致的图像失真是CMOS传感器快速读取功能的副作用。对于快速移动的标本,全局快门和全局复位功能是可以帮助抑制失真的理想解决方案。
动态范围 :就单色相机而言,动态范围不应作为模拟-数字(AD)转换位深度进行比较,而应作为图像数据的完整位深度与读出噪声的比率进行比较。使用适当的高端16位相机时很少在普通荧光成像过程中出现动态范围相关问题。彩色相机的情况有所不同。这是因为使用标准显示器时,每个RGB通道的彩色图像数据都存在8位限制。人眼由于能够连续适应亮度而具有更大的动态范围,因此8位是不够的。确保良好图像质量的关键在于设计一条能匹配人眼响应的对比度曲线(图2)。
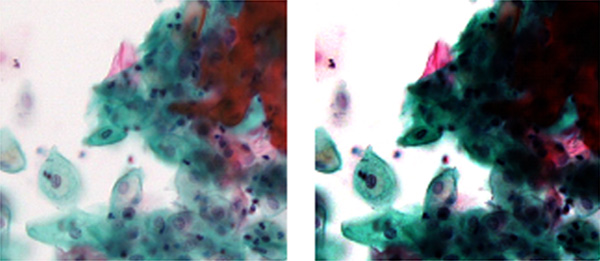
图2 –显示浅色明亮细胞和深色分层细胞的对比曲线设计良好图像示例(左)。对比度曲线设计不佳的图像(右)就不是这样。
视场(FOV):有些相机带有大尺寸图像传感器,即使使用1X相机适配器也可在提供18mm对角线的视场。其他采用相对较小传感器的相机通过使用倍率小于1X的相机适配器获得较大的视场。但是,这样做会造成阴影和光学像差的问题,尤其是在您距离光轴更远(对角线超过18mm)(图3)和进行图像拼接(图4)时。
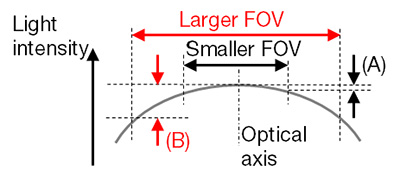
图3 –视场大小的光强度平坦度示意图。一般来说,与较小的视场配置(A)相比,较低的倍率适配器或较大的传感器所提供的较大视场会产生较差的平坦度(B)。平坦度在很大程度上取决于物镜和光学配置。
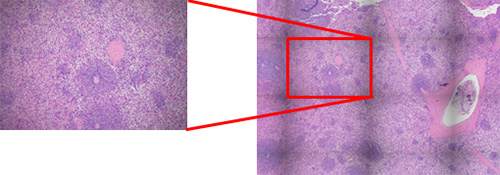
图4 –采用图像拼接的阴影(光强度不均匀)明显(右);在单视场图像中不太明显(左)。
色彩还原 :由于人眼与相机传感器的光谱响应不同,因此相机供应商需要使用多种技术在显示器上获得与您通过显微镜目镜观察到颜色相似的颜色。适当的白平衡(WB)是实现适当色彩还原的第一步。专用于明场(BF)观察的自动白平衡功能可自动检测实时明场图像中的“白色”背景,从而无需您进行耗时的手动操作。为了实现高色彩还原度,图像处理通常要用到将来自传感器的RGB信号转换为显示器上的R'G'B'信号的色彩矩阵。但该过程受独立轴数限制,例如,由于均包含红色信号,其可防止在不关联DAB棕色染色的情况下调节曙红。多轴颜色调整是一种绕过该限制并针对各种染色颜色进行优化的方法(图5)。显示器的色彩空间和色彩匹配也很重要。Adobe RGB色彩空间可以表示更大范围的色彩,其对于诸如Masson三色染色的鲜艳绿色特别有利,但是如果没有正确的ICC配置文件交换,Adobe RGB显示器的图像数据无法显示在其他sRGB显示器上。
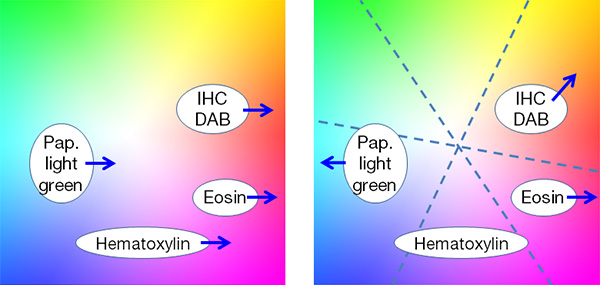
图5 –通过传统颜色调整,曙红的红色增强(左)将会影响到所有其他染色,而多轴颜色调整(右)可为每种染色独立优化颜色
本节讨论的所有关键要素均不具有独立性。分辨率、灵敏度、帧速和视场之间存在深度关联。观察标本区域时,较小的像素间距可提供较高的分辨率,但灵敏度较低;而具有较低倍率的相机适配器可提供较低的分辨率、较高的灵敏度和较宽的视场。为避免在制备过程中对样品造成光毒性损伤,使用像素合并可能有所帮助,其可以缩短曝光时间并提高帧速。诚然,使用像素合并技术会牺牲一些分辨率,但是在实验设置阶段,分辨率并不是非常关键。
图像处理和功能成像
对于某些应用而言,图像处理被用于超越传统的光学和物理限制。景深扩展图像(EFI)技术可用于尤其是通过体视显微镜在单幅图像中对较厚标本进行采集(图6)。高动态范围(HDR)成像由于能够捕获反射标本而经常被用于工业检查(图7)。增强荧光实时图像信噪比的技术有几种。例如,仅在显微镜载物台静止时才起作用的自动多帧平均是实现快速帧速和高信噪比的一种方法,其同时对样品的光毒损害极小。
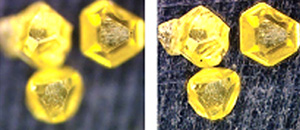
图6 – EFI:(左)未使用EFI,(右)使用EFI
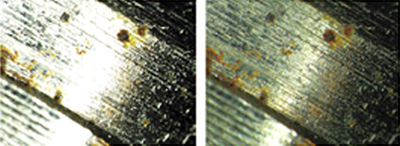
图7 – HDR:(左)未使用HDR,(右)使用HDR
结论
由于关键因素之间相互深度关联,因此有关图像质量的讨论非常复杂。但是,在选择显微镜相机时,最好根据显微镜观察的最重要需求做出决定。市场上存在的各种相机型号可以让您打造一个每个要素均达到平衡的系统。由于相机说明书中不会介绍不同相机之间的复杂性和性能差异,购买前进行全面评估是确定相机是否适合您应用的可靠方法。为应用选择合适的光学元件和相机可以为您提供更多的数据和更高的图像质量,而先进的图像处理功能可以让您超越显微成像的传统限制。
作者
Takeo Ogama
科学解决方案部
OLYMPUS CORPORATION OF THE AMERICAS
对不起,此内容在您的国家不适用。